Learning functionals via LSTM neural networks for predicting vessel dynamics in extreme sea states
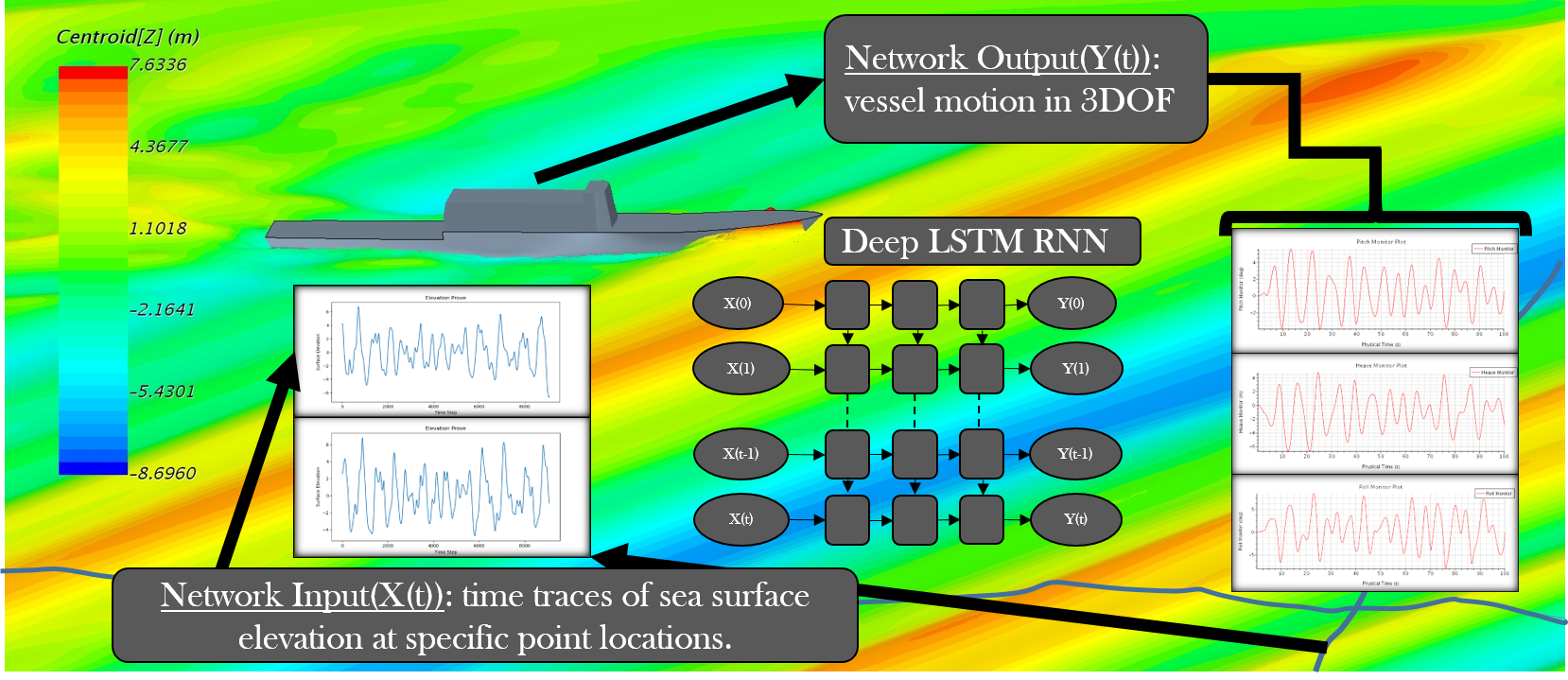
Being able to predict motions of vessels in extreme sea states given sea state realizations helps evaluate the operability of vessels in extreme sea states. In the following work we train LSTM neural networks to learn non linear mappings between sea state realizations and non-linear vessel motions that result from them.